Anschluss eines DCF77-Moduls an ein DOG-M-Display mit Hilfe eines PIC16F628
Die in [1] und [2] beschriebene Herstellung einer DCF77-Uhr lässt sich auch für die Verwendung eines DOG-Displays [11, 13] nutzen. Letzeres zeichnet sich durch eine gute Darstellungsqualität und vielseitige Betriebs- und Ansteuerungsmöglichkeiten aus. Zudem wird der Kontrast per Software eingestellt, so dass ein üblicher Trimmer entfällt. Allerdings ist die Initialisierung des DOG-M-Displays herstellerseitig etwas sparsam dokumentiert.
Viele Hinweise und Hardwareideen aus den angeführten Quellen führten letztlich zur dargestellten Lösung.
Um das DOG-Display mit dem Pollin-Modul (DCF1) zum Laufen zu bringen, waren folgende Änderungen in der von [1] veröffentlichten Firmware erforderlich:
- Die Pull-Up-Widerstände des PIC müssen abgeschaltet werden!
- Das Empfangssignal muss invertiert werden.
Wichtiger Hinweis:
Wenn in der Initialisierungroutine der Befehl 0x28 fehlt, lassen sich keine benutzerdefinierten Zeichen in den CGRAM schrieben.
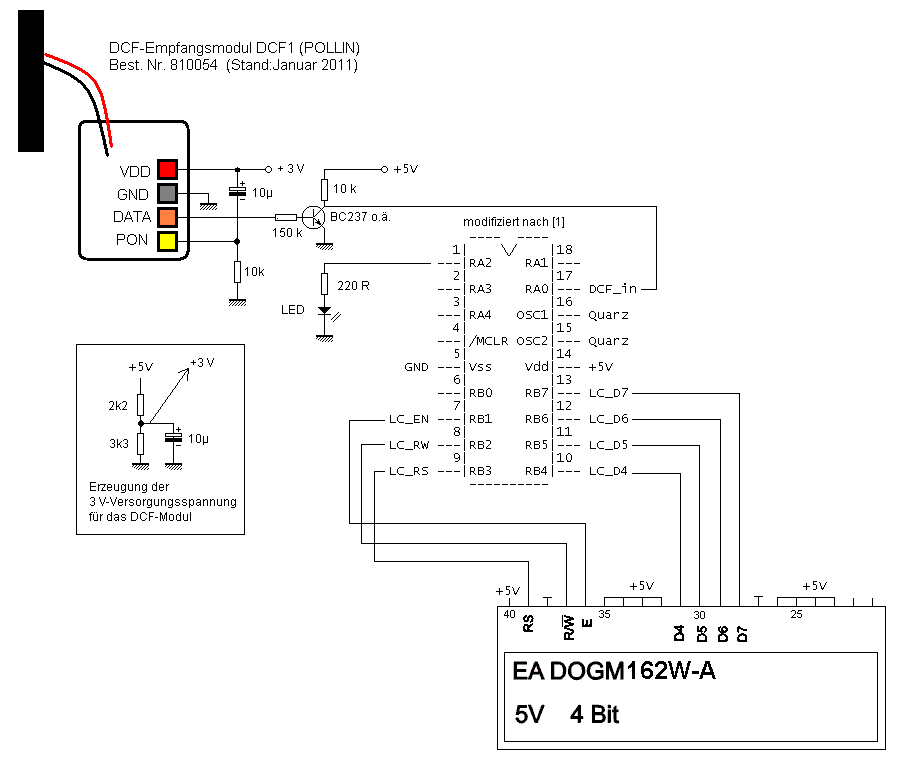
Gesamtschaltung
Da das DCF1 mit maximal 3,3 V betrieben werden darf, muss der Datenpegel für den PIC-Prozessor angehoben werden. Das erledigt T1. Allerdings wird dabei das Signal invertiert, so dass die Firmware entsprechend angepasst werden muss.
Der DATA-Ausgang des DCF1-Moduls sollte nur möglichst gering belastet werden. Bei ersten Versuchen zeigte sich ein Basis-Vorwiderstand von 10 k als zu gering, so dass es zu Verfälschungen des Signals kam.
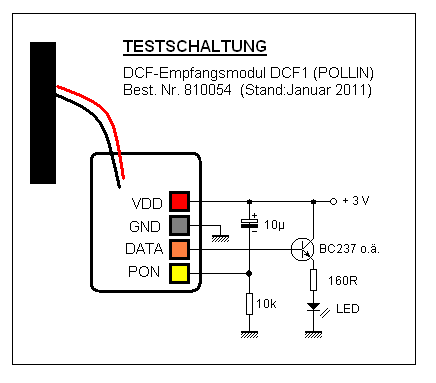
Testschaltung
Mit der folgenden Schaltung lässt sich die Funktion des DCF1 leicht überprüfen. Der BC237 dient als Impedanzwandler. Das RC-Glied erzeugt nach dem Anlegen der Betriebsspannung eine negative Flanke am PON (PowerON) - Pin und schaltet das Modul ein (vgl. [5]). Bei guter Empfangsqualität blinkt die LED mit normaler Helligkeit im DCF77-Takt. Ist der Empfang durch Störungen überlagert, so bleibt zwar der Takt sichtbar, jedoch leuchtet die LED nur noch schwach.
Betriebserfahrungen
Die Entfernung zum Sender in Mainflingen beträgt ca. 200 km. Bereits wenige Sekunden nach dem Einschalten liegt ein sauberes Signal am DCF1-Modul an. Die Firmware des PIC benötigt dann etwa zwei Minuten bis zur Synchronisation.
Nach Erhöhung des Basis-Vorwiderstands von 10 k auf 150 k Ohm synchronisiert das DCF1-Modul ständig. Der DATA-Ausgang darf also nur gering belastet werden. Als erstaunlich stabil erwies sich das Modul selbst bei Ausrichtung der Ferritantenne auf Empfangsminimum. Auch hier blieb die Synchronisation erhalten.
Der 16F628 wird mit dem internen 4 MHz-RC-Takt betrieben, was den Quarz einspart. Ohne DCF-Synchronisation läuft die Uhr allerdings mehrere Sekunden pro Stunde falsch. So ist bei schlechter Empfangslage der Quarzbetrieb vorzuziehen.
Quellen
[1] http://www.unagel.de/dcf/picdcf.htm
[2] http://www.elektronikbasteln.pl7.de/dcf77-uhr-mit-pic.html
[3] http://www.ledstyles.de/ftopic13077.html
[4] http://www.dcf77logs.de/WebConsole.aspx>
[5] http://www.b-redemann.de/sp-project-dcf77.shtml
[6] http://www.mikrocontroller.net/topic/156661
[7] http://www.obonic.de/dcf77-empfaenger-grundlagen/
[8] http://www.ibr.cs.tu-bs.de/users/thuerman/time/dcf77-receiver/dcf-receiver.html
[9] http://www.mikrocontroller.net/topic/169867
[10] http://www.mikrocontroller.net/articles/HD44780
[11] http://www.lcd-module.de
[12] http://www.pollin.de
[13] http://www.reichelt.de